
|

|
|
本帖最后由 yanvan 于 12-12-17 20:52 编辑 前言 自己一直喜欢赛车,平时爱好动画的 Initial D,ps3游戏的GT 5赛车,对于漂移更是情有独钟,自从发现了这个漂移车玩具后一发不可收拾 进入这个毒圈了,通过Google找到了这里,但是新手刚入门发现自己很难容入,RCfans也算是国内论坛最大的遥控车模型论坛了,但是论坛中一直不容易找不到自己想要获得的知识,相对一些国外论坛对于新入菜鸟刚入门的知识倒是很有顺序醒目,所以自己有空收集了一些文章,在这里和大家一起分享,主要是新手入门准备的,老鸟请无视 自己车架买好了,装车现在因为还有部分零件没有到货,正好有个空闲把收集的文章用自己语言和大家分享下 纯属个人爱好 其中一些翻译由于国内并没有正式的语言 我都是参考Google到的Wiki还有自己在玩ps3上的GT5 Apex的台湾翻译版本来解说的 感觉国内玩这个的还真是比较少。 其中肯定有很多错误 希望大家一起指正,英文原文都是在 drift mission网站上有 根据我自我需要删除了一部分和国内玩家无关的内容。 Frequently Asked Questions – RC Drifting 第一课 Getting Started Guide 准备开始漂移吧  RC drifting can be done with any on-road 4WD based vehicles. Electric powered vechicless provide better throttle response and are prefered for drifting. Nitro cars can be used but are a bit more complex and wont be covered in this guide. Just get an on-road TC car and you are on your way. The most basic and easiest form of RC drifting is 50/50 Drifting. In an all wheel drive on-road touring car, the power is distributed evenly to drive the front and rear differentials of the car. 50% of the power drives the front wheels and 50% drives the rear. So all you need now are drift tires.Now that you have the car and the tires, you are ready to start sliding! 在遥控车里任何4轮驱动的车都可以做出漂移。然而电动遥控车相比油车有更好更精准的油门控制,所以本文只讨论电动车漂移。(当然油车也可以漂移只是有更为复杂的设置和控制,不在本文讨论范围内)。最为基本的漂移就是用50/50动力分配的遥控车来完成,所以有遥控车的你只需要装上适合漂移轮胎,那大家就一起来漂移吧! 第二课 What is 50/50 drifting? 什么是50/50漂移? The traditional way of drifting. In an all wheel drive on-road touring car, the power is distributed evenly to drive the front and rear differentials of the car. 50% of the power drives the front wheels and 50% drives the rear. This can be accomplished with any on-road AWD touring car. It is recommended that newbies start here and then move on the Countersteer setup after mastering 50/50. 这是一种传统的漂移方式,在4轮驱动的遥控车里,车子行驶是由于马达的动力通过差速齿轮被平均分配到前后的轮子来驱动的。既是前轮获得马达的50%后轮也获得50%的动力。建议刚接触遥控车的新手从50/50的漂移开始学习并在熟练掌握后才开始学习如何设定逆向调节过弯(在RC里也被称为反肽)的技巧。 附 其实在RC里50/50漂移经常被大家通俗叫做正胎。 第三课 counter steer 还有 Counter steer (CS) RC drifting? 逆向调节过弯状态 Opposite lock, also commonly known as counter-steering,it is a colloquial term used to mean the steering associated with the deliberate use of oversteer to turn a vehicle rapidly without losing momentum. It is typified by the classic rallying style of rear-wheel drive cars, where a car appears to travel around a tight bend sideways. The terms "opposite lock" and "counter-steering" refer to the position of the steering wheel during the maneuver, which is turned in the opposite direction to that of the bend. The technique works best on loose surfaces where the friction between the tires and the road is not too high, but can also be used on asphalt or other surfaces with high friction if the vehicle has enough power to maintain speed. Before entry to the bend, the car is turned towards the bend slightly, but quickly, so as to cause a rotating motion that induces the rear of the car to slide outwards. Power is applied which applies further sideways movement. At the same time, opposite lock steering is applied to keep the car on the desired course. As the car reaches the bend it will have already turned through most of the needed angle, traveling sideways and losing some speed as a result. A smooth application of power at this point will accelerate the car into the bend and then through it, gradually removing the sideways component of travel. Opposite lock can be a useful technique for saving a car from a loss of control such as an unintentional skid. A related technique is the handbrake turn, in which the rear wheels are deliberately locked in order to break the friction between the tires and the road, allowing the car to be spun around a very tight bend or junction, etc.  红色部分就是counter steer的过程 这是我是从Google里搜的wiki所以也一起解释一下, 何为甩尾?首先从真实赛车的基础知识开始学习吧 countersteer就是一种特殊的过弯方法,简单的说就是让车辆呈现侧滑状态并绕过弯道的技巧,实际甩尾过程分成三个步骤,大家会比较容易理解,首先过弯时大幅度转动方向盘,车子出现转向过度(oversteer)的情况让车子后轮滑出,接着利用逆向调节过弯技巧(countsteer)防止车辆打滑转圈,然后就这样在逆向调节过弯状态下踩油门,让赛车在赛道上呈横向滑出即可。当进行逆向调节过弯时反打方向盘幅度过大时候,横滑就会停止,油门踩的过渡则车辆会彻底打滑。如果无法巧妙的在二者间取得平衡,便无法维持甩尾状态。(这段是wiki对真实赛车中的countsteer的解释,我们的RC遥控车就是模拟这真实赛车的漂移动作,此段翻译是个人的理解加上GT5赛车Apex书上的解释来意译原文的,所以有部分会和原文有些不同,有能力的同学可以都看一下) 附 countsteer setup就是大家在论坛中通俗叫的反胎,日文是反肽。 What is Countersteer (CS) RC drifting? 在遥控车里什么是 CS RC drifting In the RC drifting world, CS drifting refers to changing the drive ratio of the front, rear or both differential. By changing the drive ratio, the power distribution of the car will no longer be 50% front and rear. If the power distribution is differed by for example: 30% front and 70% rear, then the car behaves more like a RWD car; similar to a real drift car. This makes the car more difficult to drive due to the rear wheels trying to out-drive the front wheels of the car. This leads to more countersteering and also adds to the realism of scale drifting. 在遥控车里CS drifting 就是指通过调节前后齿轮比,那这样原本的50/50马力分配就改变了,可能就是前轮30%,后轮70%,我们的目的在于就是要后轮转速>前轮转速,跟接近于真实赛车的后轮驱动车辆。其实这样就是为了让遥控车更接近于真实车的漂移。当然这样也就使得遥控车更加难以控制了(这就是为什么新手要先从50/50漂移开始学习,当然自恃天赋秉异的同学可以忽略)因为后轮的驱动力量大于前轮了。 关于真车能实现的漂移 请参考【gwen001出品】反胎的实现☆★为什么要后轮转得比前轮快★☆ 这位GWen大大解释的很清楚了, 我还没有能力发布url连接,大家自己论坛搜索吧。 第三课进阶 What is the difference between CS Percent and CS Ratio? CS百分比和CS率 到底有什么不同、我们经常看到高手调车有写到 50%, 80%, 100% CS and 1.5, 2.20, 2.52 CS,这些代表什么意思呢 It is common to see 50%, 80%, 100% CS and 1.5, 2.20, 2.52 CS, so what do the percent and ratio mean? 50% CS and 1.5 CS ratio are equivalent (50%CS == 1.5CS Ratio). It means that the rear wheels are spinning 50% more for every revolution of the front wheel. So 1.5CS Ratio means for every 1.0 revolution the front wheels make, the rear will revolve 1.5 revolutions. For 80% CS/1.80 CS ratio. The rear wheel will spin 80% more than the front wheel. For every 1.0 revolution of the front wheel, the rear wheels will revolve 1.8 times. 100% CS == 2.0 CS ratio; Rear wheels will spin 100% more than front wheel. For ever 1.0 revolution of the front wheel, the rear will turn 2.0 times. 2.20 CS ratio == 120% CS; Rear wheels will turn 120% more than front wheels. For ever 1.0 revolution of the front wheel, the rear will make 2.2 revolutions. 2.52 CS ratio == 152% CS; Rear wheels will turn 152% more than front wheels. For ever 1.0 revolution of the front wheel, the rear will make 2.52 revolutions. 其实就是数学表达式 50% CS 等于1.5 CS ratio 他们都表示前轮转一圈时后轮就转1.5圈 80% CS=1.80 CS ratio. 前轮转一圈时后轮就转1.8圈 100% CS == 2.0 CS ratio; 前轮转一圈时后轮就转2圈 2.20 CS ratio == 120% CS; 前轮转一圈时后轮就转2.2圈 2.52 CS ratio == 152% CS 前轮转一圈时后轮就转2.52圈 注解翻译到这里发现老外的数学很差啊,其实就是个不同的数学表达方法,这个我们中文一句话就能搞定了, 哈哈 补充内容 (13-10-31 09:28): 发现论坛有个问题自己的帖子只要时间一长 都不能再次编辑了,所以更新在此 难得 发现一个月前的帖子 被大家又翻出来了 新手们热情高涨啊,正好这次看到论坛上正好有童鞋问道了 陀螺仪 这个玩意儿 呵呵 ... |
|
本帖最后由 yanvan 于 12-12-18 11:12 编辑 第四课 Shaft vs. Belt? 我选轴车呢还皮带车? A hot topic of conversation in the RC world for racers and drifters. Both have their respective advantages and disadvantages. It all comes down to personal preference. 这二种车各有优势请看下文 Belt Drive Advantages: 皮带车优点 1. Easier to drive; smoother power delivery, little to no torque steer due to layout and orientation of the motor 2. Quieter than shaft driven counterpart; more efficient and smoother drive system 3. More options for countersteer modifications 1. 易驱动,动力传输到轮毂更柔和轻盈,由于皮带车的传动方式基本上不容易受到或没有“加速跑偏”的影响 2.相比轴车会噪音小些,动力操控上会感觉有效更细致 3.改反肽有更多的选择 Disadvantages: 1. Belts stretch over time and needs replacing 2. Unsealed or exposed differential; small debris like pebbles can get into the drive line and cause damage 缺点 1.皮带长期使用需要更换 2.没有封闭的车厢来保护齿轮,平时维护要注意特别是跑街时候小石子或其他碎片飞入易损害车架。 Shaft Drive 轴车 Advantages: 1. Instantaneous power delivery, throttle on demand 2. Sealed differential; low maintenance and less prone to damage, great for parking lot bashing or any un-prepared surface 优点 1.马力强劲,油门猛发力狠。 2.由于齿轮在封闭车厢内,维护相对皮带车较简单不易损坏,易适应各种场地 Disadvantages: 1. Torque steer; the torque created from the motor that influences the steering of the vehicle 2. Minimal options for countersteer modifications 缺点 1.由于轴车本身结构易受到 “加速跑偏”的影响 2.改反肽配件相对皮带车来讲没那么丰富 第四课 进阶篇 What is Torque Steer? 什么是“加速跑偏” Torque steer occurs in all shaft driven chassis’ due to the layout of the drivetrain in relation to the motor and pinion. Without getting too technical, since the rotation of the drive shaft is perpendicular to the wheels of the car, the rotational force (torque) delivered from the motor has to change direction several times before it gets to the wheels. This causes the chassis to have the tendency to slightly “steer” itself and favor one side. If you have a shaft driven car, set it down and floor it without steering. You’ll notice that the car will eventually start to drift to one side automatically, or you can tell that it’s easier to drift one way compared to the other. Belt driven cars do not suffer from this because the drivetrain is inline with the wheels. The pulleys are parallel with the wheels and motor rotation. Torque is delivered evenly and in the same direction (front to back), and only needs to change direction once (at the pinion and spur). It’s possible to reduce torque steer by adjusting your setup. Most of us just live with it since it’s not that big a deal unless the torque steer is really bad (usually with big motors). “加速跑偏”在所有轴车上都会发生,主要是轴车的结构布局和各个传输齿轮造成的,不用太技术性的语言来说就是当于马达的动力通过各个齿轮的传输最后达到轮毂时,会产生偏向一个方向的转向力,也就是说,你给遥控车加速并不打方向时候会发现车辆在行驶过程中会偏移直线并象某一个方向转弯。这样你会发现你的车子可能更容易的象某一个方向转弯,反之向另一边方向过弯则会吃力些 皮带车由于皮带传输的布局所以不会受到这种影响。所有的动力传输都是在车上以直线性的方式传输到轮毂上的,齿轮运动方向(大小齿轮的转动)都是和轮毂平行的,所以力的传输时在直线上是均衡的 当然“加速跑偏”现象都是可以通过车子的调节来改善的,一般情况下轴车的“加速跑偏”并没有那么严重一般都能接受,而且只有在大马达功率输出的情况下“加速跑偏”才会特别明显 第五课 What does it mean by offset? 什么是轮毂偏移量 The offset of the rim is basically how much the lip of the rim sticks out from the face. Offset is measured in millimeters. The bigger the number, the “deeper” the rim. Common offsets are 0,3,6, and 9mm. Rims from speedway pal in Japan sometime come in offsets greater than 10 mm. 
轮毂偏移量就是我们说的轮毂中心到到轮轴的距离,请看图左边是正offset 中间是0 offset 右边是负offset,简单来说正offset会让轮子靠外端车壳平移,负的值会让轮子向内侧车架靠拢。offset的单位是毫米mm,普通设置量为0,3,6,9毫米,当然也有选手也会设置到10毫米以上的 What offset should I use for my body? 那我的车壳应该设置什么轮毂偏移量 First, you need to know the width of your body: Tamiya, Yokomo, and some ABC bodies = 190 mm HPI bodies = 200 mm (with the exception of the Trueno and Levin). Of course there are certain bodies such as the BMW Z3 and S2000 that are slightly smaller. The larger the body width, the bigger offset rim you can use. Most tamiya and yokomo bodies can only use up to 6mm. HPI’s can take 9mm. Of course, if you add a little camber, you can probably use a bigger offset. Also, look at the body and the shape. Take the yokomo supra for example. Now I mentioned before that deep offsets change how the chassis drifts. How? A bigger offset means that the tires stick out more. When the tires stick out more, you are changing the track width of the car. Now it can be contested that a couple of mm won’t make that much of a difference. But depending on the surface, it can. Just something to keep in mind in case you’re wondering why your Chaser body with 12mm offset rims is under steering a little. 首先要设置offset你必须知道自己的车壳宽度,一般来说tamiya,yokomo和部分的ABC车壳宽度都是190毫米,HPI的车壳是200毫米(也不是全部有些车型会有特例)。当然有些车型的车壳宽度比如BMW Z3 和 S2000会再小些,总之车壳越宽你就可以设置越大的offset,就拿yokomo的车壳来说大概可以有6mm的轮毂偏移量,HPI的话9mm,当然你对于轮毂增加一定的倾斜角度(camber)的话,你可以设置的偏移量还会在大一些。那么到底offset设置大小对于车架的漂移会有什么样的影响呢?增大了offset就等于了增加了车宽,,事实证明仅几毫米的offse设置可能对于车架来说差距不大,但是在不同的赛道上那表现就可以不一样了,总之记住如果设置到12mm的offset的话你的车子会有出现转向力不足的表现。(对于原作者最后的几句话我个人的简单理解意思就是offset越大车子就越难控制,offset加大是好事当然你技术也要有能力才行,新手菜鸟的话一般就4-6mm设置吧,当然你对自己技术有信心而且车壳够宽的话 直接挑战12mm的offset吧) 附(有关 camber后文会有解释) Gearing 齿轮比 The wrong gear ratio is one of the leading causes to overheating issues in the motor and the ESC. First, understand that FINAL drive ratio is different from PRIMARY gear ratio. To calculate your primary gear ratio: Spur Gear # teeth / Pinion Gear # teeth = primary gear ratio So…if we have a 61T spur and a 19T pinion you would get: 61/19 = 3.21 So your primary gear ratio is 3.21. Now, to calculate your FINAL drive ratio (which is what we use when figuring gearing out) you need to know your internal gear ratio, meaning the gear ratio of your transmission only: Spur / pinion x internal ration = Final Drive Ratio (FDR)..remember, divide first and then multiply…;) So in the case of a TT-01 which has an internal ratio of 2.6, it would look like this: (61/19) x 2.6 = 8.34 FDR If you don’t feel like doing math, go here to our tools page and input your numbers. You can also find out what your internal ratio is on that site. So what does it all mean? This means that the pinion needs to make 8.34 revolutions to get the wheels to turn 1 revolution. For primary ratio, it takes 3.21 revolutions of the pinion to get the spur to turn 1 revolution. The higher the FDR, the more low-end torque you get. A lower FDR gives your more high end RPMS (some guys relate this to more horsepower and top speed). For drifting, usually a setting between 7.25 and 8.5 is good 错误的齿比会造成严重的后果。 首先认识二个齿轮比 1. Final ratio 最终齿比 2. primary ratio 主齿轮比,他们二个代表意义完全不同。 primary ratio= 车架大齿 / 马达小齿 比如你是 61T 大齿 19T 小齿就是 61/19=3.21 Final ratio 最终齿比呢首先打开车架说明书找到车架的齿轮内比值,用它去乘以大齿数/马达齿数,得到的结果就是你车架的最终齿比。 (翻译到这儿,作者还提示大家先除后乘。。。我就不翻译了{:soso_e113:} , 想象下国外同学的计算能力吧,他们小学都快乐教学培养创新能力,平时计算吗用计算器,而我们从万恶的小学就开始背乘法口诀了啊。 扯远了 {:soso_e107:} ) 如果是车架TT-01 内比是 2.6,那答案就是(61/19) x 2.6 = 8.34 FDR 对于数学计算能力差的同学 老外还提供了计算器齿轮比的网站。。。 {:soso_e127:} 得出的最终齿比涵义就是马达转8.34圈你的轮子就转1圈,主齿轮比就是你的马达小齿轮转3.21圈你的大齿轮就转1圈。 Final drive ratio 最终齿轮比越高 马力就越大,一般漂移的话7.25-8.5 T足够了。 一般情况小的马达齿加上大的大齿,可以使你的车提速增加,但是最高速度会下降。相反,大的马达齿加上小的大齿,会使你的最高速度变快,但是起步会变慢。 你可以根据场地和车架,都有一个最适合自己的最终齿轮比,你可以参考电调和马达的说明书,或者更好的办法是,在场地上自己亲自尝试,搭配不同的齿比,找到最适合场地和你的操控手法的,而且电池和动力都可以承受的了的最快车速。另外,必须时刻注意马达和电调的温度,错误的齿比会造成严重的后果。 |
|
本帖最后由 yanvan 于 12-12-17 15:44 编辑 继续第五课 What is camber? 什么是轮毂的外倾角 How much camber do I need? 那我需要设定多大的外倾角呢? Basically, it’s changing the angle of your wheels so that they lean in towards the center of the chassis (measured in degrees). Note that for some weird reason camber is positive in the RC world, but negative in 1:1 racing…don’t ask. We all just call it negative since it’s what we’re used to. Camber is achieved by shortening the suspension upper arms on your chassis by turning the turnbuckle. What camber does is help create more contact between the tire and road when turning. Here’s a little physics. When you drift there are several forces acting on the car. First there’s the inertia at which the car is travelling due to acceleration and momentum (remember that a body in motion will stay in motion unless acted upon by an unbalanced force..Newton’s 1st law). Then there’s friction at the tires that is working opposite of the inertia. The result is that when you go hard into a turn and slide, weight shifts towards the outside of the turn laterally (again, watered down physics lesson). And when that happens, due to the weight transfer and how suspension works, the chassis will “lean” into the direction you are travelling, and the inside of the tire will lift slightly. See below. Ever wonder why old school 1:1 drifters used oni-kyan or “demon-camber” (a lot of camber in the front) when they drift? It’s to reduce front tire slide and improve steering in the front (more traction) for an underpowered car, reducing understeer. Although this doesn’t apply RC as much since your chassis is 4WD, the concept is similar. So with camber, you can see that your initial contact patch with the ground is minimal when standing still. But in the middle of a turn, the car leans, and the contact patch increases. This gives the leaning side a little more traction and grip which is important when you are exiting the turn, or trying to pull in on a clipping point. Again, the answer to how much camber do I need, it depends. In my opinion, unless your set for countersteer, 3 degrees is enough. A lot of guys use 3 degrees front and rear, which is typical on yokomos. My TB03 has 1 in the front and 2 in the rear, and my TT01 runs 0 camber all the way around (it weight shifts a lot). So test it out and figure out what suits you the best. Remember that more camber increases traction in a turn and less camber decreases traction. The one thing you have to remember about camber is that eventually the inside tire wear will “flatten” out eventually. So even though you have cambered wheels, the initial contact of the tires will be completely covering the ground as if you were running 0 camber. So watch your tire wear and replace the wheels if needed. 
 大家看上图 camber的定义为由车前方看轮胎中心线与垂直线所成的角度,向外为正,向内为负。这个光说大家不明白还是看图简单,camber的角度的不同能改变轮胎与地面的接触点及施力点,直接影响轮胎的抓地力及磨耗状况。并改变了车重在车轴上的受力分布,避免轴承产生异常磨损。 到这里这里作者对于车辆运动中进行了一些定理解释,我这里就用我自己的语言并参考了GT5 的Apex讲解下车子的动态负重状况,首先车辆静止的时候前轮和后轮的负重是一致的,当你启动车踏油门时,由于惯性车辆的负重是前轮轻后轮重的,反之在过弯踩刹车时候惯性的作用使得车辆的负重前轮重而后轮轻些的,那同样前后轮子受到的路面摩擦力大小也是根据车的行驶状况而不同的。(这个例子在后面的避震器一课中也会用到)。 那么我们再次看图 
由于过弯时候的惯性,左边一组图片是没有设定过camber的情况下,上图是直行中轮胎全部着地没有问题,但是关键是在左侧下图当车辆向右转时,大家看到由于过弯时惯性的作用轮胎接触地面的部分比较少了,所以抓地力小那么就会产生转向力不足(under steer)这样就无法完成过弯,反之右边一组图是设定过了camber时候,虽然右上上方直行是抓地力不够,没关系我们重点不在直行加速上,请大家注意看右下图就是再次右转向的时候,轮胎由于惯性作用下全部着地,抓地力大大增加了,形成转向力增大(over steer)这样你在出弯时 可以获得最大的摩擦力,这样就可以最大的加速度出弯。 好了再次继续翻译 一般悬挂的设定中最重要的大概就是外倾角,外倾角决定了车子静态时的轮胎贴地性。0度时轮胎胎印的橡胶分子的贴地性最平均也最佳,当刹车时我们希望四个轮子的胎印是平贴地面,加速时我们希望驱动轮是平贴路面,而过弯时我们也希望轮胎能平贴于地面,尤其是两个弯外轮。 在刹车和加速时最佳的外倾角是0度,在过弯时负0-2度的外倾角可增加转向力(over steer)。在直线和弯道上所需的外倾角设定是完全不同的,事实上还需要配合悬调整体的设定并考虑车身滚动的问题,才能得到正确的设定角度。 左右轮的外倾角必须相等,在力的平衡下不致影想车子的直进性,再与束角(Toe in/out)配合,提高直进稳定性及避免轮胎耗不均。增加负的外倾角需配合增加Toe-out;增加正的外倾角则需配合增加Toe-in。(toe in/out后文会有解释) 实际情况举例当希望车子倾向转向力减少的话(under steer),可以将前轮设定为正值,而后轮使用负值,越多效果越明显。 当希望车子倾向转向加强的话(over steer),可以将前轮设定为负值,而后轮使用正值,越多效果越明显。 同样那我需要设定多大的外倾角呢?这个回答因人而定。我的意见是除非你已经设置好了反肽,一般3度足够,对于大部分yokomo车架的朋友来说前后轮都设置为3度足矣,作者的TB03前后轮都只有设置2度。TT01都是0度,这有自己在试跑中不断的找到自己最合适的角度就好。 你要记得的是,无论你设置多少camber你的轮胎内侧最终都会被磨平,记得时常检查你的轮胎磨损情况,并及时调整新的。 第五课进阶篇 名词解释什么是轮子的toe in和toe out What are Toe-in/out adjustments for? 调整束角有什么用处呢 ? Toe will help stabilize your car in a straight line. Generally RC kits come setup with rear toe in to help with straight line acceleration. More rear toe will stabilize the car, but increase tire wear. Less rear toe will make it more tail happy. Its a little bit different for the front toe. Running toe-in will again help with stability in straight line, but you lose turn-in capability (less turning angle, on the tire closest to the corner), and also lessens the ackerman angle. Toe-out will add stability and increase the turn-in, but increases ackerman angle. As far as what works best, its really up to your car and how you drive. 首先 增加个束角的解释 因为driftmission 没说 就自己Google了下 前轮 
后轮 
Toe角度(束角)是描述从车的正上方看,车轮的前端和车架边直线的夹角。车轮前端向内侧倾斜(内八字),称为Toe in;车轮前端向外倾(外八字),称为Toe out。束角的功用在于补偿轮胎因外倾角及路面阻力所导致向内或向外滚动的趋势,确保车子的直进性。同样的 Toe in会造成转向不足,Toe out则会增大转向过度的趋势。不明白的请继续看图 。 束角就是可以使你的车子保持稳定在直线行驶中,一般出厂的遥控车后轮都会默认把后轮设置为内侧倾斜(内八字),这样可以帮助车架保持直线行驶加速更有力,车架设置了越大的后轮内侧倾斜就越稳定,但是轮胎的摩擦也相应变大使用时间变短,越小后轮的内侧倾斜却能够让你更顺畅的打滑使出甩尾,但是记住对于前轮的设置束角则有些不同,前轮设置内侧倾斜的话的确能稳定直线行驶,你会增加ackerman angle角度即不容易甩出(ackerman angle又是个名词解释了) 自己Google吧, 贴一张wiki的解释图片。 附:Ackerman角度是指车转向时两个转向轮之间形成的夹角。不是指转向角度。Ackerman指的是由于转向系统形状的几何特性,使车辆转向时内侧轮比外侧轮转动更多的角度。内侧轮(相对弯心而言)通常会比外侧轮要转的角度大一些。加大转向角度时,这个夹角也会相应变大。通常设定Ackerman是通过改变转向推杆在转向杯上的固定孔位来进行。转向推杆的角度较大时将会产生更多的Ackerman角度,反之类同。 由于车辆转弯时内外轮的行驶半径不同,Ackerman可以帮助两个前轮轮分别指向正确的行驶方向,以获取更多的抓地力。 
简明的说,在前轮使用toe in可以帮助你的车在加速时保持稳定。这样做也会减少车子在入弯时的转向反映,同时增加加速出弯时的转向反映。如果需要在进入弯角是获得更多的转向,可以使用toe out。这样做使车子在加速时,或者通过起伏路面时,变的不稳定,偏离直线。一般在平路跑,推荐使用0-1度的toe out。反之越大角度的toe in或者toe out,越会减低车辆在直线的加速能力。 |
|
本帖最后由 yanvan 于 12-12-18 14:38 编辑 继续有关轮子的话题 How long do tires last? 轮胎使用寿命多久 Tire wear depends on how you drive, the setup of your chassis, and the surface. Obviously, a chassis with a big aggressive motor is going to eat up tires on asphalt, while cambering your wheels will create inside tire wear. For the most part, your tires will last several months depending on how often you drift. But it’s always a good idea to stock spares if you can. You can also rotate your tires every now and then to even the tire wear out. 轮胎的磨损主要还是看每个人的驾驶风格,还有在什么路面玩得多。显而易见的是如果你是使用强劲而大力的马达的话你的轮胎很快会在沥青路上磨平,对于大部分的人来说还是要看你玩漂移车的频率,最后还是建议你有个备用的胎,而且平时在玩的过程中也要经常检查下你的轮胎磨损度,你甚至可以翻转轮胎来延长使用时间。 What are “CVD’s”? CVD 是什么呢?英文全称 Constant Velocity Drive-shaft   这个直接用青蛙{:soso__6984081194057794752_1:} 余老板的装机图片来给大家看吧, 算是给他做个广告,呵呵 我车架就是他那里购买的。 CVD的中文名字我还真没有 想出来 CVD’s replace the “dogbones” that fit between the differential cups and the the outer drive cups at the wheels. Unlike dogbones, the outer drive cups are connected to the dogbone on a CVD unit. This prevents the dogbone from slipping out (especially in the front when turning) and provides a better transfer of power from the differential to the wheels. Those who have lost or thrown a dogbone know that it’s a good thing to get, and makes life much easier when taking things apart.The only drawback it that the nut holding the drive cup to the dogbone can come loose, shredding your wheel hub. So be sure to add a little thread lock to keep it in. CVD 这个名词在我们中文上并没有对应的官方解释,不过装过车架的朋友都知道,CVD就是代替了以前“老式狗骨棒形状”的一种车轴,优点是易拆解组装,在传输动力上更优异,并且它在前轮进行转向的时候不容易滑脱,这个进化的东西就是用来连接大齿轮和轮毂的轴吧(希望有朋友提供更好的CVD中文解释给我),CVD的缺点就是狗骨连接处的盖杯用久了会松散,请及时检查加固吧。 附录 以下内容完全是因为自己装过车架后的体验 算是给CVD的额外补充 先看官网图片 狗骨 
还有 CVD完成版 
最后是包在CVD外面的C杯 
还有它的安装图解 
另外一般的CVD的角度是45度就是表示你前轮在入弯时候可以获得更大的转向 为了取得更好的漂移姿态例如yokomo 厂商出了大角度的SUZUKI 55度 CVD 看图 
好像没啥不一样吧 呵呵 用量角器量过才知道呐 (VERTEX出品的cvd真的有测量到55度{:soso_e154:} ) 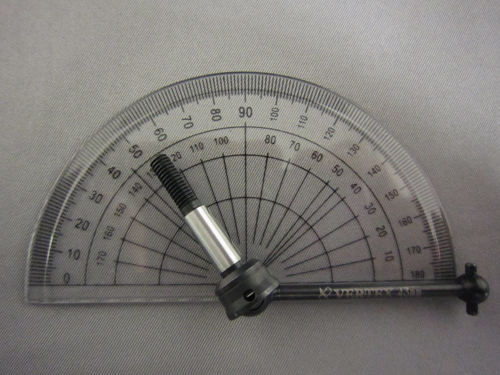 但是你以为直接装上就可以可以获得大角度了吗?JS不是这么容易混的,yokomo的原厂C杯限制了SUZUKI 55度CVD的最大发挥(虽然他有出过4度7度10度的C 杯,但是余老板告诉我比赛中一般选手用的车都超过了10度),所以你必须继续OP,呵呵 大家看 yokomo还出了个没有限制CVD角度的配件 图片看这里 ¥1680).jpg")
这个是安装好后的图片 
好吧现在你可以在物理条件上获得最大的角度进行更加漂亮的漂移了 个人意见是 新手还是等玩熟透了现有手上的配件和车架,熟悉了车性后 针对自己的技术在考虑如何OP 注 OP有二种意思 1,over power 升级加强。 2. optional parts,其他可选配件。 第六课 Suspension Guide 避震器指南 Shocks aka “Dampers” For drifting, you typically want your rear suspension “softer” than your front. get soft springs. Springs come in different spring rates. The lower the spring rate, the less weight is needed to compress that spring. In other words, springs with lower rates are softer. Many companies color code, so pay attention to what you are buying. use lighter shock oil in the rear. Shock oil is measured by “weight”. The higher the number, the heavier the oil. Meaning that a heavier oil will make the shock piston compress slower. Note that some companies (like yokomo) label their shock oil 100, 200, 300, etc. It’s the same concept. A typical shock setup looks like this: soft springs all the way around (usually HPI titanium orange or something similar in rate);35 to 40 wt in the front;15 to 25 wt in the rear. Some guys like to use the same shock oil all the way around, and change the springs in the front to a stiffer spring, or even use a stiff spring AND heavy oil in the front. Since suspension tuning has so many dynamics to this, I won’t confuse you guys by explaining every little bit of tech about shocks (it would take up the entire post). But you should understand that shocks and springs work opposite of each other. When a shock compresses, the spring is resisting the compression and wants to rebound. The damper controls how fast your suspension will compress, while the spring determines how fast your suspension will rebound when weight is transfered. This sentence sums how suspensions works really well: “Springs may dictate HOW MUCH weight is transferred, dampers dictate HOW and WHEN that weight is transferred.” 先看图 
避震器又称阻尼装置,对于玩漂移的朋友来说最普遍的设置就是让你的后轮避震器要比前轮避震器设置的更软。(至于为什么请读者在想想我介绍camber时举的例子,行驶中车轮受到车子的负重是一个动态的状态,前后轮受到的力一直在变化平衡中) 接下来说到弹簧,那就要说弹簧的不同指数,这里我以yokomo弹簧来举例,下面是Yokomo的各种颜色的弹簧指数。 
Orange – 18.87 / Green – 16.06 / Pink – 14.93 / Yellow – 14.71/ White – 12.94/ Blue – 12.12 指数越高表示越硬,越低就越软。你想买是软还是硬就自己Google指数好了。接下来就是避震油了,他们是以重量来测量的,数值越高的油就越重,也表示受到缓冲时下压速度会较慢,但是yokomo的避振油直接编号为100.200.300.虽然不是以重量为标志但道理也一样越高越重。  一般大众化的配置就是前后全部配上极软弹簧(例如HPI钛系列橘色弹簧),但避振油配置是前轮35-45 wt,后轮15-25wt左右的数值吧。 也有朋友喜欢前后都使用一样的避振油,只是前轮弹簧比后轮设置的比较硬,或者前轮重油加硬弹簧,这各种配置都可以只要符合后轮避震器要比前轮避震器设置的更软就行。这里就不用太专业的详细解释了,只是要大家了解。避震器和弹簧的相互作用是相应的,当避震器受到外力压缩时,弹簧则相应的给予反弹力准备好下次反弹。避震器控制下压的速度,弹簧时控制反弹的时的速度的。换句话就是弹簧体现车架受到多少力回馈,而避振则能显示出什么时候你车架受到到多少重力的。(本文最后一句话 我自己觉得翻译下来很拗口,希望有朋友高手帮忙指点下) |
|
本帖最后由 yanvan 于 12-12-20 20:31 编辑 今天补充一下 有朋友fldslh说 为什么避振一定要前硬后软 他的就是不是,的确怎样调都可以的因为路面,驾驶风格每个人都不同 那我再引用 国外朋友的一段话 加上 我在GT 5调教车子上的经验谈一下 原文 quto Read more: RC Drift Perfomance Tips 一般遥控车 就是前软后硬 Suspension The recommended set up for drifting is to set the suspension soft at the front and stiff at the rear of the car. Stiffen the rear shocks by using thicker oil in the damper and smaller piston holes. For the front suspension, use thin oil and large piston holes. Set up the suspension so that the rear of the car has more travel -- this pushes more weight over the front wheels giving them more grip when the throttle is released. This also helps to maintain a skid even when there is no power at the rear wheels. 漂移实用车 A 同学 My expierience is that more drivers prefer front hard and soft in the back. I'm using such a setup as well: Soft in the back gives me more traction, what helps a lot to make the transistions more controllable Hard in the front gives less traction, so less sharp steering reactions, which helps me to spin less. I also have thicker shock oil at front than in the back. Might be that this kind of setup fits only front fixed motor chassis (like VDF, DRB I.e.) yeah, I think it to. B同学 (他就是不习惯前后软前硬,但是换了场地后就习惯了) I drift with a TRF416 (motor in back), and I can't really use super soft springs in the rear. When I do that, it's like driving on ice. Current setup for me is soft in front, and stiff in rear. But last weekend I drove on an other surface, and I had to much grip. so changed to medium in rear. C同学 For my TA05 conversion it′s the same thing, harder oil and stiffer springs in front make it much (!) more controllable. General rule is, if you want the chassis to understeer more, use a harder front (softer back) suspension. If you want it to oversteer more, use a softer front (harder back) suspension. With that in mind and some testing you can get the chassis to handle exactly how it suits your drifting style. As for the benefit of the front motor mount, on one hand it feels more agile, since you are not swinging such a heavy tail around. But the biggest benefit imo is that the balance is almost equal left to right without additional weight. 注解 大家可以看到在国外论坛也是各有不同的避震用法,那我们还是从真车来说起吧 真实赛车上弹簧前轮系数高的话可以使方向盘转向敏锐,降低系数会出现转向不足。 后轮弹簧系数提高会强化车轮的寻迹性(台湾的翻译说法 我觉得其实就是稳定些),同样减少弹簧系数会使赛车容易出现转向过度。 更为复杂的是真实赛车避震器分为收缩端和伸展端来调节。 A.伸展端就是控制避震器恢复原状的速度数值大就越慢恢复,一般加大避震器伸展端数值也就相提高应它的弹簧指数,所以伸展端数值大车子容易维持因荷重移动形成的状态,容易失控。数值较小悬吊组就会迅速恢复状态。 B 收缩端 正好与伸展部分相反,数值调小车架容易吸收路面的凹凸,可以增进行驶的稳定性,调大会使车辆出现提高弹簧系数的状态,动作较为锐利。这时悬吊组支撑力变强 方向盘操作变的灵敏。 这样看完了大家应该明白了,为什么我所说的是对于一般漂移赛车大众化配置前硬后软,因为漂移过程(大家可以看第三课)其实就是入弯减速大幅度转方向盘,车辆开始滑出,接下来counter steer 加上油门 来维持,请大家注意我以前举例提过的车轮受到的负重是个动态的情况。 请看图吧,上图是减速,下图是加速 
大家请看减速到加速前后轮的受力情况,加速时后轮负重变大,而到了减速时前轮就负重变大,我们的车架在漂移过程中整个负重一直处于这样的动态,所以说一般情况下避振设置前硬后软,是为了让新手能更加容易的甩尾。 国外同学B也说道后轮避震器和弹簧极软时就像在冰上开车一样,他不适应。所以有些高手会根据路面和自己的驾驶特色来改变避震器的设定,总之多加练习,你掌握了避震器原理后就随你的自己喜好调车,找到最适合自己的。 其实这个也是1/10遥控车最吸引我的地方,每个细节改造和OP都很好的模拟了真实赛车行驶中的一部分OP,让我们乐在其中 今天补充最后一部分 Springs 有关弹簧 I get a lot of people asking if they HAVE to buy HPI titaniums or the Yok titaniums to drift. The answer is no. As long as they are soft, it doesn’t matter what brand or type you have. Titaniums are nice, I’ll admit. But I’ve used generic, HPI, Tamiya, and springs from japan. Springs all work the same. They compress and rebound and give similar results. Don’t feel the spring to test the softness..look at the spring rate. 很多人都来问我是否需要购买 HPI或YOKOMO的钛系列弹簧,我的回答就不用。我们需要的弹簧是非常的柔软类型和什么厂商牌子类型并没有太大的关系,不可否认的是钛系列的弹簧质地非常的不错我也使用过但是和其他日本牌子的弹簧来讲,实际功用却都是一样的,弹簧的本质功能压缩反弹的效果都差不多,千万别自己用手来感觉什么弹簧是好的,请看它的指数就行。 (呵呵yokomo和HPI或其他制作钛弹簧厂商看到的话 一定晕!不是砸场子吗 {:soso_e116:} ) Ride Height vs. Droop. Guys get this mixed up all the time. First, they are not the same, but they are related. Ride height is exactly what it sounds like. It’s how high the bottom of your chassis is from the ground standing still. Low ride height means lowered center of gravity, and it usually means better handling and and less body roll. 车高和Droop是非常容易混淆的东西,首先他们并不是一样的东西,车高就是如同字面意义是一样的,是指你车子静止时候车架的底部到地面的距离。 越低的车高就会重心越低,也就意味着有着更好操控性,更稳定些。 注 Droop 大家都没有一个统一的官方说法 有的说车高差 有的说悬挂下垂。。。 算了先用Droop原文吧 Droop is something different, although it looks like you’re adjusting the height. Droop is adjusted using droop screws that are in the lower suspension arms of your chassis (both front and rear). It is the amount of upward or downward travel of your suspension above or below your ride height. In other words far up the chassis will “raise” after you’ve pressed down on it. The purpose of droop is to help with the weight transfer from front to rear when on throttle or braking. Say that your car is under steering when you let off on the throttle in a turn. What the chassis is doing at this moment is shifting the weight from the rear of the car to the front (imagine coming to a dead stop after going 60mph at a stop sign). When this happens, the rear end lifts a little. By adding more droop to the rear (letting your suspension have more upward travel), more weight is transfered to the front tires, giving it more steering and grip, and lessening the load on the rear. wiki解释(Droop is a much discussed topic (how to measure it, what it is etc) Put simply, droop is the amount of difference between the ride height and the limit for the suspension arms. Downstops are found on most modern touring car chassis and are used to limit the amount of downtravel that the suspension arms have. When someone running a touring car says they are running "5 droop on the rear and 4 on the front" they actually mean that the suspension arms are measured at 5mm below the chassis level and NOT the actual droop measurement. To measure droop, use a ride height gauge and take a measurement of ride height at one end of the vehicle. Now lift that end of the vehicle slowly until you get to the point where the tyres leave the ground. Measure the ride height again at this point. The difference between the first and second measurement is Droop. To measure downstop travel, remove the shocks and any anti roll bars you may have installed on the vehicle. PLace the chassis on some droop blocks and make sure the suspension arms drop under their own weight. Now take your droop guage and take a measurement from the bottom of the suspension arm. This can be changed by turning the downstop screw in that suspension arm (higher number on the guage = less downtravel.) 后吧这里统一对Droop做一下 注解 我也是wiki找到的,翻译的不准确,请大家一起来帮忙。 其实Droop是指车静止时和车完全伸展时既是把车子提在空中看看悬挂臂的最大伸展能力的那段高度差(因为第一次要量车高,第二次要把车子抓离地面再次悬空测量),可以理解为车高和最大车高的差值而,Downstop是指悬挂臂向下最大的行程下止点的调节是通过拧紧/松臂上的一颗螺丝来进行的。在车的一端增加Droop会增加另一端的抓地。车子转向明显不足时,可以增加车架后面Droop。其实就是允许更多的重量向车的前方转移;更多的重量意味着更多的抓地,也就是更多的转向。其实原理和我以前讲的车轮负重差不多,前低后高的话前轮的负重就大了。 从国外的网站来看Droop应该是一个很强大的参数。我现在还在研究中。 希望大家给我指导 今天最后更新陪伴我翻译的书籍和GT5 游戏照片二张 请欣赏 

希望喜欢赛车的朋友一起来讨论 |
广告投放|联系我们|手机|投稿|Archiver|About us|Advertise|遥控迷模型网|RCFans ( 粤ICP备10210518号-1 )
版权所有 RCFans.com © 2003-2016






