
|

|

|
本帖最后由 谷谷 于 17-1-29 22:36 编辑 经过了艰苦的奋斗,终于把自己的车子开到赛道上了!控制系统还是和之前的四驱版电房差不多,这次主要改进了车架,并修改了一些转向辅助的参数。实验中发现,转弯时,在后轮主动提供转速差异的同时增加一些前轮的混控可以得到更顺滑的操控感。可能由于车架精度的大幅提高,电子稳定辅助被我关了不少,照样很稳不会甩。目前主要的问题还是一个速度太慢,然后程序还不够细腻,不能分辨出弯、弯中和进弯几种不同的状态。但我已经基本上感到厌烦了,虽然还不甚完美,但我依然有点喜欢上了它 非常有趣的操控体验,和其他任何车都有点不同 ps:做了这些试验后发现轮子和轮子直接有点连接还是很有必要的 感谢帮助我调整赛车的车友,让我顺利完成测试 http://v.youku.com/v_show/id_XMj ... 5!2~5~5!2~5~DL~DD~A 跑的不好,见笑           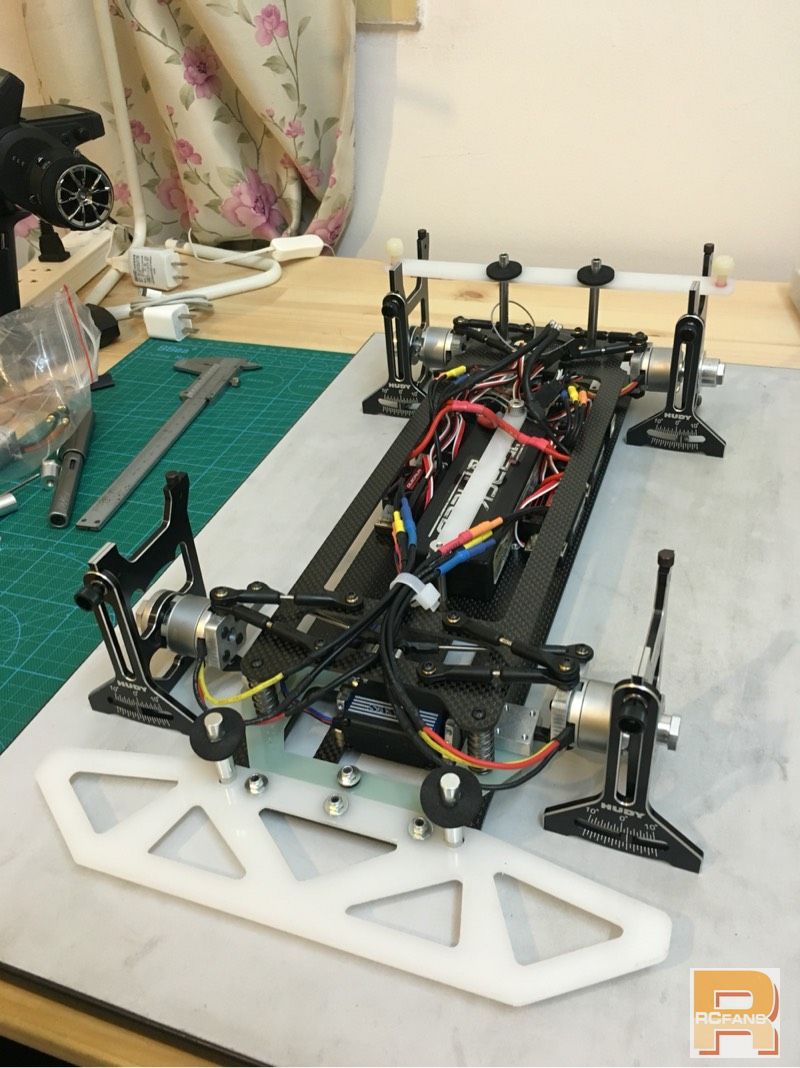 
.jpg")

.jpg")


|






广告投放|联系我们|手机|投稿|Archiver|About us|Advertise|遥控迷模型网|RCFans ( 粤ICP备10210518号-1 )
版权所有 RCFans.com © 2003-2016







